Project presentation
The
lack of some active joints, the absence of sensory feedback, the
complexity of the command and the consequent heavy cognitive load,
lead to a rather high
rate of rejection of prostheses in upper
arm amputated
(transhumeral)
patients. For the ones still using their prosthetics, these
issues limit the overall use of the device, reduce their capabilities
and autonomy, and indirectly force them to develop compensatory motor
strategies (use of the trunk, knees and hips) which could, in the
long term, lead to critical musculoskeletal disorders.
The
objective of BYCEPS
project is thus
to
develop a biomimetic upper-limb
prosthesis that offers a fine, natural and simultaneous control of
its movements
acting in symbiosis with the body of its wearer, thus allowing
transhumeral amputees to regain more capacities and greater autonomy,
without having to resort to invasive techniques nor surgery. Indeed,
rather
than decoding complex physiological signals or considering cumbersome
invasive approaches,
the
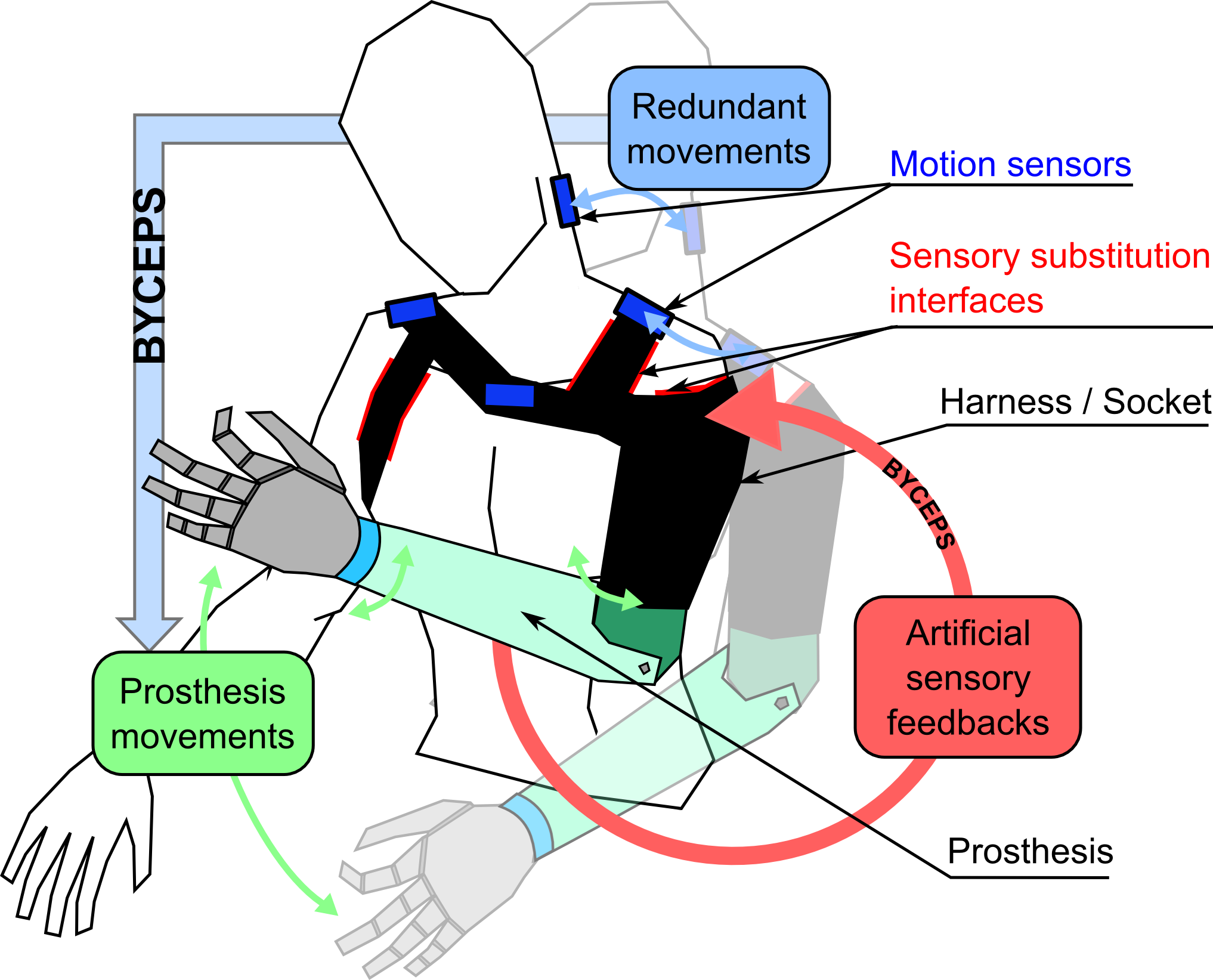
BYCEPS project proposes instead to exploit the kinematic and sensory
redundancy of the body and the ability of humans to learn new
gestures, even complex.
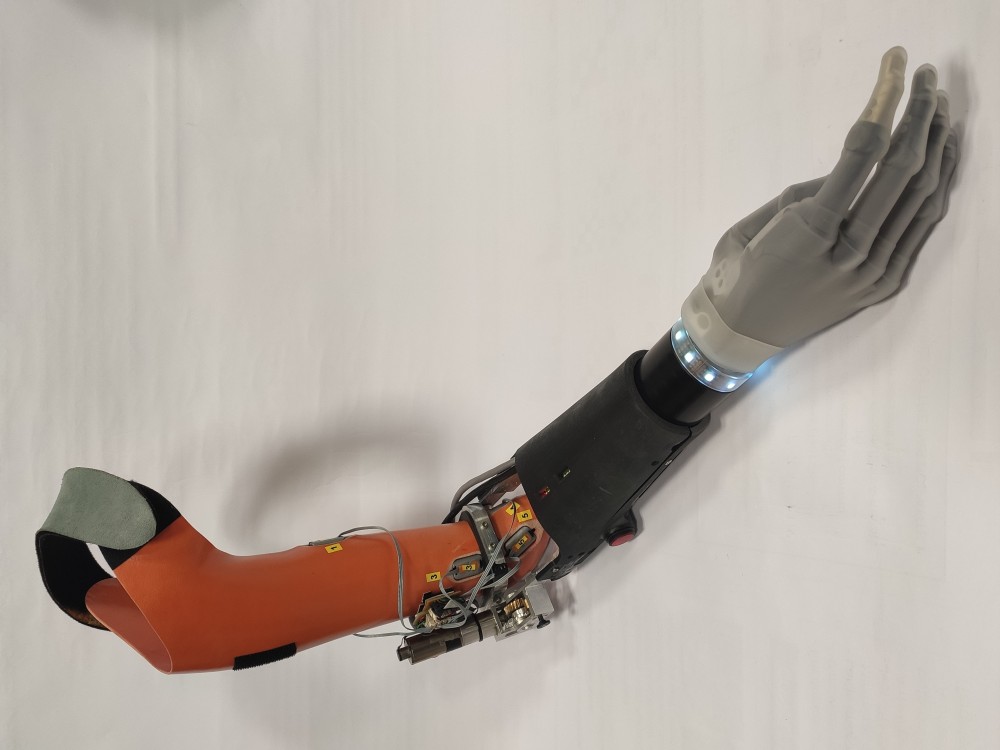
Concretely,
BYCEPS will develop a simple, affordable and efficient prosthetic
structure with three robotic active joints (elbow flexion/extension,
wrist rotation but also a humeral rotation) compatible with
commercially available myoelectric prosthetic hands; along with an
associated natural, intuitive and ecological sensorimotor control
approach that relies on movement and projects the motor and sensory
capacities of certain redundant joints of the human body onto the
prosthesis (such as the shoulders, neck or trunk).